

ものづくりやろう!
第十八回 ローテーターのワイヤレスリモート制御化実験
1. はじめに
先月(9月)の中旬に台風が私の住む近畿地方を通過するかのような情報が流れましたので、アンテナを下して台風に備えていました。台風が通り過ぎて行ったらアンテナの整備もしようと張り切ってアンテナを分解していましたらローテーターケーブルに傷をつけてしまいました。ケーブルを新調すればいいのですが、この際ですからアンテナ切り換え装置と同様、リモート切り換えを試みることにしました。これで扉を横切るケーブルがまた一本減りそうです。
2. ローテーター
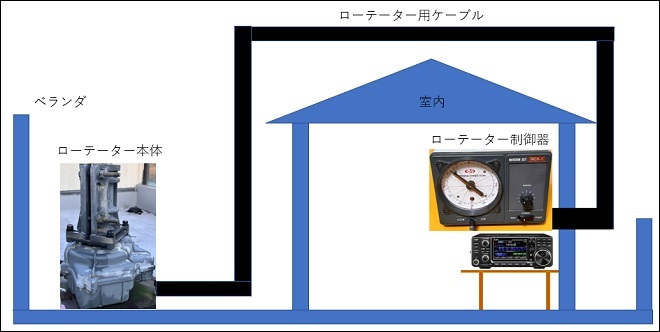
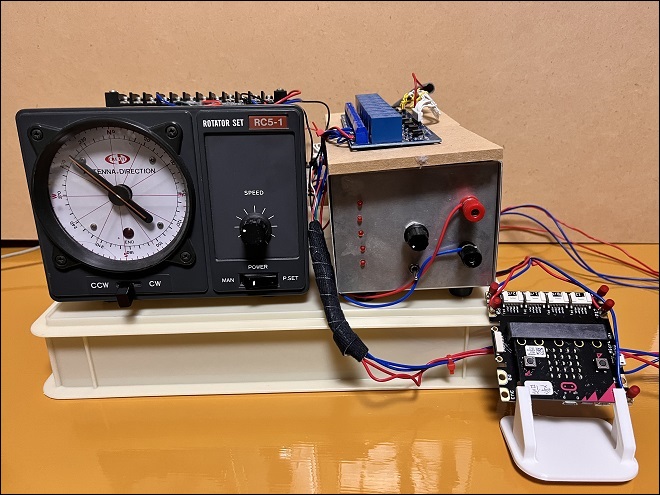
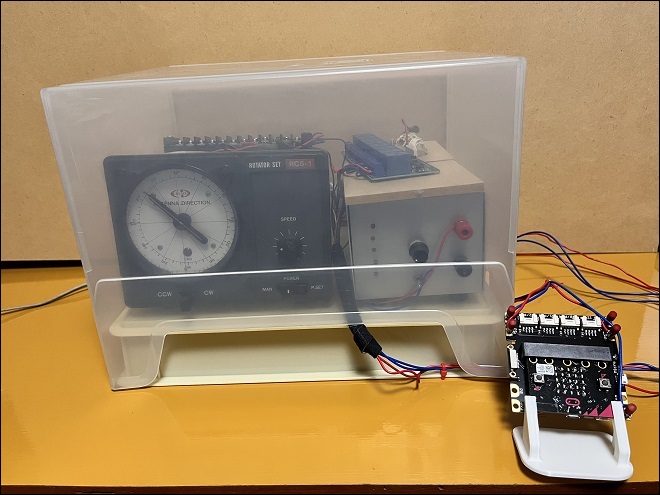
写真1、2のクリエートデザイン社製ローテーターは何年か前にヤフオクで落札したものです。落札品を受領して電源を投入したときには方位表示が動かず、配線図を見ながらテスターで触れる端子を確認し故障発見を試みました。「ポテンショメータが壊れているんだろうな」と判断し、それ以来方位表示ができないまま使い続けています。ローテーターの設置場所は北側ベランダ。私の無線機の置いてある場所から近距離ではありますがどちらを向いているのかは視認できません。方位情報のかわりにAtomというネットワークカメラとそのソフトウェアの携帯アプリを使用してモニターをしています。正確な方位はわかりませんが夜でも見えるので、ローテーターを分解修理することなくそのまま使用しています。

写真1 アンテナ本体(ローテーター)とローテーター制御器(インジケーター)

写真2 ネットワークカメラ(Atom)による方位のモニタリング
ローテーターをリモート化するにあたっては、マイコン(micro:bit)やリレーユニットの機能、設置場所などを次のように決めました。
(1) 現在室内に置いてあるインジケーター(制御器)をローテーターの近く(屋外)に移動する。
(2) インジケーターとローテーターの電源は屋外コンセントからとる。
(3) インジケーターのリモート制御のために、インジケーターにリレーユニットとマイコンを外付けする。
(4) リレーユニットとマイコンで、つぎの2点をおこなう。
① インジケーターとローターの電源のON/OFF
② ローターのCW、CCW方向の回転制御リレーのON/OFF
(5) 無線機近くのマイコンと、インジケーター近くのマイコンを無線でつなぎ、無線機近くのマイコンから、(4)の制御をおこなう。これは、
③ インジケーターとローテーターの電源のON/OFF制御信号をローテーター側マイコンに送る。
④ インジケーターのCW、CCW方向の回転制御の信号をローテーター側マイコンに送る。
図であらわすと、図3のようになります。
(a)現状

(b)無線化後
図3 リモート化機器構成
3. インジケーターまわりの改変
インジケーターが手元から離れた位置に行ってしまいますので、必然的にインジケーターのスイッチに相当する機能を手元のマイコンに持たせる必要があります。クリエートデザイン社のローテーターRC5-1のインジケーター表面には、①POWERスイッチ、②CW/CCW回転スイッチ、③回転スピードのSPEED制御ボリュームスイッチ、の3つがあります。当初、この3つを実現しようとしました。しかし、③のSPEED制御はリレーユニット以外の付加装置を追加実装しなければならず、micro:bitには荷が重いと思いました。また、のんびりと無線をやっている私にはインジケーターの回転SPEEDを変えることもほとんどありませんのでSPEEDは一定にしたままで、コントロール機能を実装しないことに決めました。(「付加回路もつけなければいけないし、面倒になるぞ」という悪魔の声も聞こえて来たことも要因ですが、Hi)
付加的な回路は極力少なく、と言っても電源のON/OFFや回転方向の切り換えという事を付加装置なしに実行することはできません。そこでまたまた登場願ったのがリレーユニットです。まだ道具箱に眠っていました。
電源のON/OFFと回転方向の制御をしなければならないので回路図で触るべき部分を確認しました。図4がインジケーターの回路図の一部です。
電源のON/OFFはS1を手動でON/OFFすることでできます。このスイッチS1に並列にマイコンで制御されたリレーをつなぎます。また、S2というスイッチでCW、CCW回転を制御しています。CW方向に倒すとS2の端子2と3がつながってCW方向にモータがまわり、CCW方向に倒すとS2の端子2と1がつながってCCW方向にモータがまわります。
これから図4の赤字のようにリレーの接点を配線すれば、適切な制御信号をマイコンから送ることで各リレーをON/OFFすることができます。
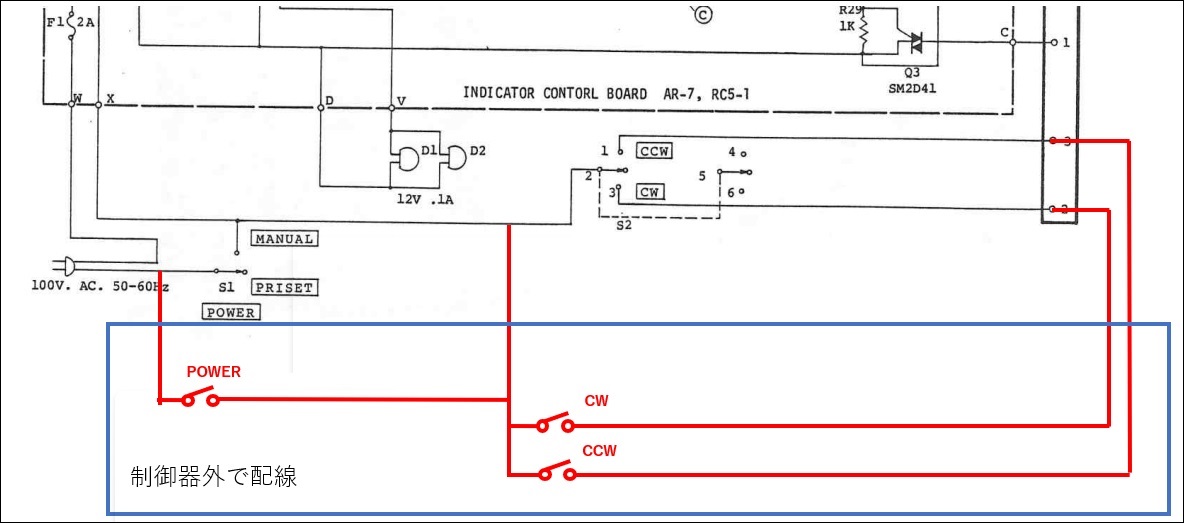
図4のようにリレーはインジケーター外にリレーユニットを準備し、そのリレーを使用します。POWERの配線2本をインジケーター内に配線し、CW/CCW制御用のリレーは外部端子2と3に接続することで配線も少なくてすみます。
実際に配線したものを写真5に示します。
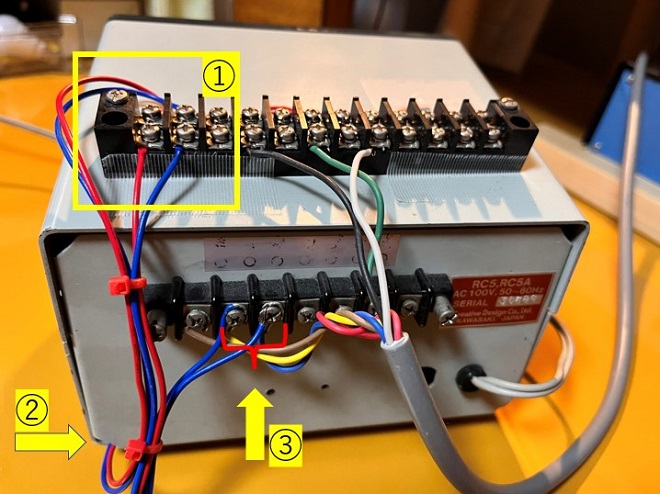
写真5 コントローラ背面の結線(POWER ON/OFF用リレー端子、方位用モータ切り換えリレー接続用端子付近)上部端子は後付けしたもの。
① 100[V]ON/OFF用リレー接続端子
② 100[V]ON/OFF用の配線出口
③ CW/CCW方向回転切り換え用のリレー接続端子
4. マイコンとリレーユニット
図4に付加回路の回路図を示し、赤字のリレーはリレーユニットのリレーであることも説明しました。リレーユニットは制御マイコンからの指令を受けてリレーをON/OFFします。この回路は以前使用した回路とピン配置が異なるだけでほとんど同じ回路です(図6)。
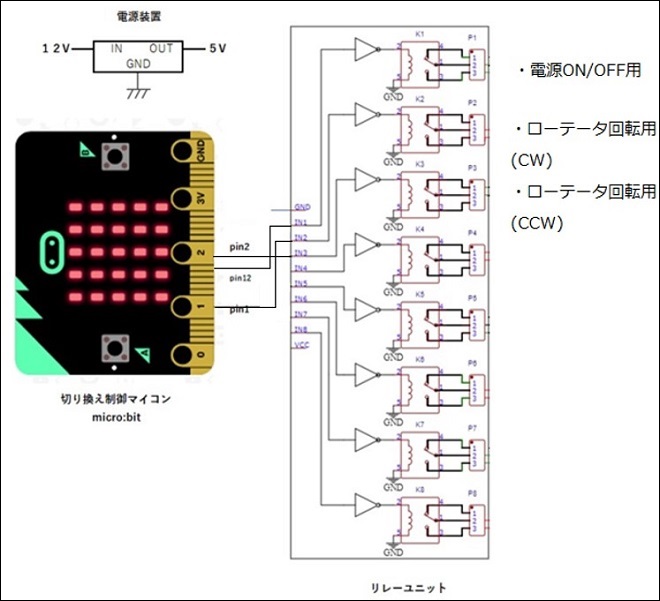
図6 マイコンとリレーユニットの配線
5. マイコンの制御シーケンス
ローテーターの制御を無線化するにあたっては、指令側マイコン(室内)と受令側マイコン(室外)のプログラムを作成しました。
制御用のマイコンとしてmicro:bitを使用したのは、アンテナ切り換え器を製作したときのソフトウェアを一部改変するだけで済むだろうと思ったからです。しかし、マイコンに持たせる機能として、
① インジケーターとローテーターの電源のON/OFF
② ローテーターのCW,CCW方向の回転制御リレーのON/OFF
という2つの機能を持たせることで頭の中がこんがらがって整理にすこし時間を要しました。micro:bitにはボタンが2つしかありませんので、この2つのボタンに「電源ON/OFF」と「モータの左右回転の切り換え」をわかりやすく割り当てるという事が整理できなかったのです。最終的に「ABボタンの同時押し」が3つ目のボタンの機能を持つことを使って解決しました。それを状態推移図で表したものが図7です。
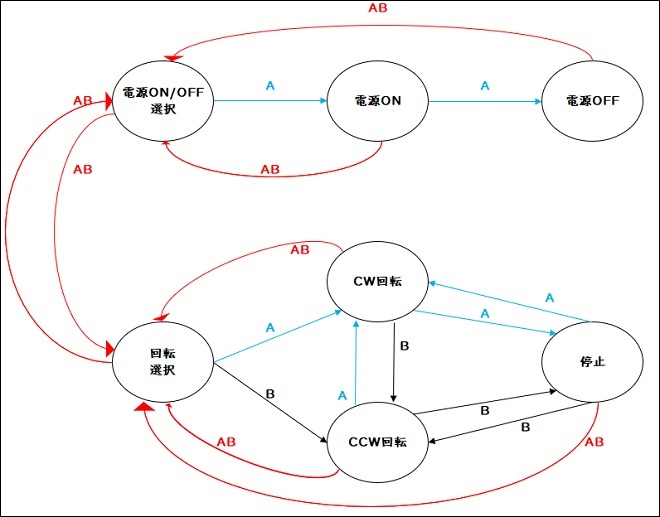
図7 A、Bスイッチによる状態の推移
図7のように、「電源のON/OFF」と「ローターの回転」という2つの動作にわけ、この2つの状態間を移動する場合や、この2つのメイン動作の先頭状態に到達するときに「AB」両方のボタンを押すという操作を実行し、2つのメイン動作内での状態の移り変わりには「A」ボタン「B」ボタンを単独に使うようにすることにしました。
マイコンのデジタル端子にスイッチを付けるということで対応することも可能でしたがボタンを増やしたくなかったのでこのようにしました。あとはこの状態推移図をもとにプログラムを作成していきました。
6. マイコンのプログラミング
製作したプログラムは2つです。
① ローテーターの電源ON/OFFとローターの回転方向を指示する指令側
② 指令側のマイコンの指示を受信してリレーユニットに駆動コマンドを送出する受令側
それぞれのソースリストの一部を記載しておきます。なおプログラム全体はダウンロードしてご覧ください。細部説明は省略させていただきます。
【指令側プログラム】
【受令側プログラム】

7. 動作試験
部品を組み立てた後、動作試験をおこなうため、写真8(a)のようにインジケーター、リレーユニット、5V電源をプラスチックの台上に置き、屋外で動作実験を行いました。雨露をさけるため写真8(b)のように上からボックスを重ねました。
(a)外観写真
(b)カバー装着時
設置場所はわが家の北側ベランダの角の壁側に置きました。インジケーターの設置場所からローテーターまでの距離は約2m位になりましたので、短いケーブルで接続可能になりました。
屋外に置いた受令側のマイコンの位置は室内の指令側マイコンから直線距離で約6mあり、2つのマイコンの間には写真9のように壁があります。また、壁と指令側マイコンの間にはさらに木の扉がありますので、この扉も閉じて送受実験を行いました。

写真9 設置場所
操作信号を送る実験をしましたが壁にさえぎられて直接観測できないため、写真9に映っているネットワークカメラをモニターとして使用し、信号が間違いなく届いているのかを確認しました。
電源のON/OFF、ローターのCW/CCW方向への回転、いずれも無線で制御することができました。誤作動も頻度は少ないですが発生しました。規則性がありませんので原因はわかりませんが、2つのマイコン間にある壁のために電波の信号が減衰して受信エラーが発生しているのではないかと思います。
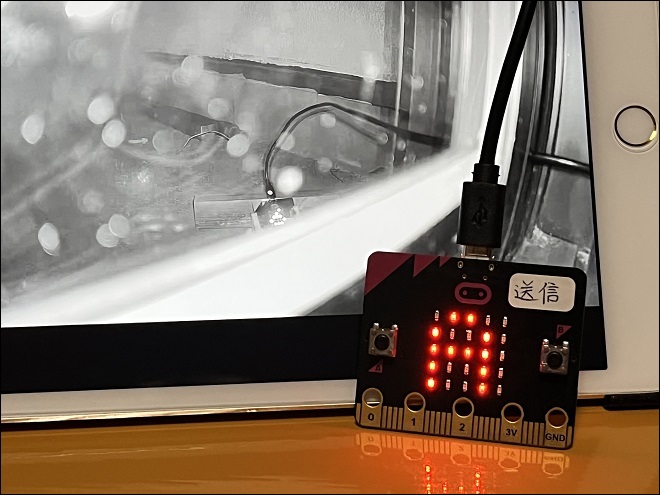
写真10 通信エラー例
受令器は指令器からのコマンドコードを受信するとそのコードをそのまま返信するようにプログラミングしてあります。指令器側では、指令のため押したボタンの番号(A、B、C)を画面に表示してコードを送信し、その後受令器側から送られてくる状態番号(数値)を受信すると表示内容を状態番号に変更するようにプログラミングしてあります。写真10のように指令器側がアルファベット(A)を送出した場合、受令側(6が表示されている)が、信号を受信できなかったために返信をしないか、または受令側が返信信号を送り返したが指令器側が受信できなかった時、両マイコン間で表示されている文字が異なり、通信エラーが発生していると判断できます。
1時間ほどの運用試験の間に通信エラーが5、6回発生していました。原因が特定できないので運用しながら状況を確認し、対応を考えていくことにしました。場合によっては元のようにケーブルを復活させようかと思っています。いずれにしても一か月は様子をみていきたいと思います。
8. これからの改善点
・雨対策・漏電対策
今まではインジケーターを室内に置いていましたが、無線化で室外に出すことにしました。電気製品ですから雨による漏電が発生しないようにしなければいけませんが、また雨や風の対策が十分ではありません。(やはりもどそうかな?)
・方位情報の取得方法
わたしのローテーターは本体内のポテンショメータが壊れていますのでインジケーターの方位表示部の針が動かず、方位が表示されていません。このため、躊躇なくインジケーターを屋外に出す決断ができました。しかし、故障もなくちゃんと動作するローテーターを持っておられる方にとっては、方位情報を捨ててまで無線化するメリットはほとんど無いと思います。ただ方位情報はポテンショメータの電圧を制御部が受取り、それを表示しているので、ローターのポテンショメータから出ている電圧情報をmicro:bitのA/D変換装置でデジタル信号に変換し室内のmicro:bitで表示することで得られます。
さて、今回の改修は誤作動が起きて不安定なものになってしまいました。
原因は?、プログラムかな?、距離に無理があるのかな?。
不具合探求はまだまだ続きそうです。
ものづくりやろう! バックナンバー
- 第三十六回 (最終回) 気になる頒布ラジオ
- 第三十五回 SDRをつくってみました(3)
- 第三十四回 これからアマチュア無線を始められる方に聞きました
- 第三十三回 SDRをつくってみました(2)
- 第三十二回 SDRをつくってみました
- 第三十一回 可変減衰器の製作
- 第三十回 再生受信機の製作
- 第二十九回 レストアのような事に挑戦(2)
- 第二十八回 レストアのような事に挑戦(1)
- 第二十七回 アンテナポールの固定具を改修しました
- 第二十六回 「マイコン版簡易リグ制御装置」の製作にチャレンジするも“挫折”
- 第二十五回 EXCEL VBAとrigctlを使ってPCでIC-7300制御にチャレンジ!
- 第二十四回 マウスをちょこっと加工してVBand用インターフェースにしてみた
- 第二十三回 有れば便利な計測器
- 第二十二回 UTC7642を使ったAMラジオの製作
- 第二十一回 Arduino Unoでつくる簡易周波数カウンタ
- 第二十回 ローテータのワイヤレスリモート制御化実験2
- 第十九回 はんだ付け ~ 私の道具箱
- 第十八回 ローテーターのワイヤレスリモート制御化実験
- 第十七回 リモートアンテナ切り換え装置の製作(無線化に挑戦)
- 第十六回 1石レフレックスラジオの製作
- 第十五回 オーディオフィルタ・アゲイン
- 第十四回 初めての3Dプリンタ(その2)
- 第十三回 初めての3Dプリンタ
- 第十二回 モールス練習機(ブザー)
- 第十一回 ヘッドフォン切換え器
- 第十回 人工グランドを試してみる
- 第九回 3.5MHzホイップアンテナの製作
- 第八回 SI4732ラジオIC基板を用いたHF帯DSPラジオをつくろう(2)
- 第七回 SI4732ラジオIC基板を用いたHF帯DSPラジオをつくろう(1)
- 第六回 SWR表示器の製作
- 第五回 GNURadioによる受信機の構成
- 第四回 音声周波数帯信号のバンドパスフィルタの製作(2)
- 第三回 音声周波数帯信号のバンドパスフィルタの製作
- 第二回 電鍵接続ボックスの製作
- 第一回 アンテナチューナの製作
NEWS
連載記事
アパマンハムのムセンと車
第2回 乗用車でのマルチバンド運用を考える
Short Break
ホワイトノイズジェネレータの製作
Summits On The Air (SOTA)の楽しみ
その61 山頂からのFT8について-5
Masacoの「むせんのせかい」
第63回 えみげんクラブ(JA1YWV)の皆さん
新・エレクトロニクス工作室
第7回 DBMチェッカ
FBのトレビア
第三十八回 ツイストペアケーブルのノイズ軽減は本当か?
頭の体操 詰将棋
2022年11月の出題
おきらくゴク楽自己くんれん
その19 軽トラック荷台に載せる移動運用シャックを作る-5
ものづくりやろう!
第十八回 ローテーターのワイヤレスリモート制御化実験
日本全国・移動運用記
第86回 高知県中部移動
今更聞けない無線と回路設計の話
【テーマ1】三角関数のかけ算と無線工学 (第9話) ギルバートセル乗算器(その1・差動増幅の基礎)
海外運用の先駆者達
その116 ブルネイでは初めてのSEANETコンベンション 1999年(2)
ぴよぴよラヂヲ@婦人部
第拾四章 大仰天! アワードが500枚
テクニカルコーナー




お知らせ
-
2022.11.15
11月号後半の記事をアップしました
-
2022.11.1
11月号の記事をアップしました
-
2022.10.17
10月号後半の記事をアップしました
-
2022.10.3
10月号の記事をアップしました
-
2022.9.15
9月号後半の記事をアップしました
-
2022.9.1
9月号の記事をアップしました
-
2022.8.15
8月号後半の記事をアップしました
-
2022.8.1
8月号の記事をアップしました
-
2022.7.15
7月号後半の記事をアップしました
-
2022.7.1
7月号の記事をアップしました
-
2022.6.15
6月号後半の記事をアップしました
トップページに表示する表紙写真を募集中です。横1000x縦540ピクセルのサイズでご自慢の写真をメール添付でご送付ください。(infoアットマークfbnews.jp) 採用者には、月刊FB NEWSロゴ入りマグネットバーを送らせていただきます。 なお「撮影者: JL3ZGL」の様に表記させていただきますが、表記不要の方は、その旨合わせてご連絡ください。 -
2022.6.1
6月号の記事をアップしました
6月4日(土)、JH1CBX/3が14MHz SSBに初オンエアします。 入感がありましたらぜひお声がけください。 -
2022.5.16
5月号後半の記事をアップしました
-
2022.5.2
5月号の記事をアップしました
5月14日(土)、JL3ZGLはオペレーターにMasacoさんを迎えHAMtte交信パーティに 参加します。詳しくは4月号のニュースをご確認ください。 -
2022.4.15
4月号後半の記事をアップしました
-
2022.4.1
4月号の記事をアップしました
-
2022.3.15
3月号後半の記事をアップしました
-
2022.3.1
3月号の記事をアップしました
-
2022.2.15
2月号後半の記事をアップしました
-
2022.2.1
2月号の記事をアップしました
-
2022.1.17
1月号後半の記事をアップしました
-
2022.1.5
1月号の記事をアップしました
トップページに表示する表紙写真を募集中です。横1000x縦540ピクセルのサイズでご自慢の写真をメール添付でご送付ください。(infoアットマークfbnews.jp) 採用者には、月刊FB NEWSロゴ入りマグネットバーを送らせていただきます。 なお「撮影者: JA3YUA」の様に表記させていただきますが、表記不要の方は、その旨合わせてご連絡ください。 -
2021.12.15
12月号後半の記事をアップしました
-
2021.12.1
12月号の記事をアップしました
-
2021.11.15
11月号後半の記事をアップしました
-
2021.11.01
2021年11月号の記事をアップしました
-
2021.10.15
10月号後半の記事をアップしました
-
2021.10.01
2021年10月号の記事をアップしました
-
2021.09.15
9月号後半の記事をアップしました
-
2021.09.01
2021年9月号の記事をアップしました
-
2021.08.16
8月号後半の記事をアップしました
-
2021.08.02
2021年8月号の記事をアップしました
-
2021.07.15
7月号後半の記事をアップしました
-
2021.07.01
2021年7月号の記事をアップしました
-
2021.06.15
6月号後半の記事をアップしました
-
2021.06.01
2021年6月号の記事をアップしました
-
2021.05.17
5月号後半の記事をアップしました
-
2021.05.06
2021年5月号の記事をアップしました
-
2021.04.15
4月号後半の記事をアップしました
-
2021.04.01
2021年4月号の記事をアップしました
連載記事 Masacoの「むせんのせかい」はコロナ禍の影響により、取材ができない状況が続いており、状況が改善されるまで不定期掲載とさせていただきます。よろしくお願いいたします。 -
2021.03.15
3月号後半の記事をアップしました
連載記事「今月のハム」はコロナ禍の影響により、取材ができない状況が続いており、状況が改善されるまで不定期掲載とさせていただきます。よろしくお願いいたします。 -
2021.03.01
2021年3月号の記事をアップしました
-
2021.02.15
2月号後半の記事をアップしました
-
2021.02.01
2021年2月号の記事をアップしました
-
2021.01.15
1月号後半の記事をアップしました
-
2021.01.05
2021年1月号の記事をアップしました
-
2020.12.15
12月号後半の記事をアップしました
-
2020.12.01
2020年12月号の記事をアップしました
-
2020.11.16
11月号後半の記事をアップしました
-
2020.11.02
2020年11月号の記事をアップしました
-
2020.10.15
10月号後半の記事をアップしました
-
2020.10.01
2020年10月号の記事をアップしました
-
2020.09.15
9月号後半の記事をアップしました
-
2020.09.01
2020年9月号の記事をアップしました
-
2020.08.17
8月号後半の記事をアップしました
-
2020.08.03
2020年8月号の記事をアップしました
-
2020.07.15
7月号後半の記事をアップしました
-
2020.07.01
2020年7月号の記事をアップしました
-
2020.06.15
6月号後半の記事をアップしました
-
2020.06.01
2020年6月号の記事をアップしました
-
2020.05.01
2020年5月号の記事をアップしました
-
2020.04.15
4月号後半の記事をアップしました
-
2020.04.01
2020年4月号の記事をアップしました
-
2020.03.16
3月号後半の記事をアップしました
-
2020.03.09
JARD、eラーニングでのアマチュア無線国家資格取得を呼び掛けるお知らせを、臨時休校で自宅待機中の小中高生に向けて発表。詳しくはこちら。
-
2020.03.02
2020年3月号の記事をアップしました
-
2020.02.17
2月号後半の記事をアップしました
-
2020.02.03
2020年2月号の記事をアップしました
-
2020.01.15
1月号後半の記事をアップしました
-
2020.01.06
2020年1月号の記事をアップしました
-
2019.12.16
12月号後半の記事をアップしました
-
2019.12.02
2019年12月号の記事をアップしました
-
2019.11.15
11月号後半の記事をアップしました
-
2019.11.01
2019年11月号の記事をアップしました
-
2019.10.15
10月号後半の記事をアップしました
-
2019.10.01
2019年10月号の記事をアップしました
-
2019.09.17
9月号後半の記事をアップしました
-
2019.09.02
2019年9月号の記事をアップしました
-
2019.08.16
8月号後半の記事をアップしました
-
2019.08.01
2019年8月号の記事をアップしました
-
2019.07.16
7月号後半の記事をアップしました
-
2019.07.01
2019年7月号の記事をアップしました
-
2019.06.17
6月号後半の記事をアップしました
-
2019.06.01
2019年6月号の記事をアップしました
-
2019.05.20
5月号後半の記事をアップしました
-
2019.05.07
2019年5月号の記事をアップしました
-
2019.04.15
4月号後半の記事をアップしました
-
2019.04.01
2019年4月号の記事をアップしました
-
2019.03.15
3月号後半の記事をアップしました
-
2019.03.01
2019年3月号の記事をアップしました
-
2019.02.15
2月号後半の記事をアップしました
-
2019.02.01
2019年2月号の記事をアップしました
-
2019.01.18
1月号後半の記事をアップしました
-
2019.01.07
2019年1月号の記事をアップしました
-
2018.12.17
12月号後半の記事をアップしました
-
2018.12.01
2018年12月号の記事をアップしました
-
2018.11.15
11月号後半の記事をアップしました
-
2018.11.01
2018年11月号の記事をアップしました
-
2018.10.15
10月号後半の記事をアップしました
-
2018.10.01
2018年10月号の記事をアップしました
-
2018.09.15
9月号後半の記事をアップしました
-
2018.09.01
2018年9月号の記事をアップしました
-
2018.08.17
8月号後半の記事をアップしました
-
2018.08.01
2018年8月号の記事をアップしました
-
2018.07.17
7月号後半の記事をアップしました
-
2018.07.02
2018年7月号の記事をアップしました
-
2018.06.15
6月号後半の記事をアップしました
-
2018.06.01
2018年6月号の記事をアップしました
-
2018.05.15
5月号後半の記事をアップしました
-
2018.05.01
2018年5月号の記事をアップしました
-
2018.04.16
4月号後半の記事をアップしました
-
2018.04.02
2018年4月号の記事をアップしました
-
2018.03.15
3月号後半の記事をアップしました
-
2018.03.01
2018年3月号の記事をアップしました
-
2018.02.15
2月号後半の記事をアップしました
-
2018.02.01
2018年2月号の記事をアップしました
-
2018.01.15
1月号後半の記事をアップしました
-
2018.01.05
2018年1月号の記事をアップしました
-
2017.12.15
12月号後半の記事をアップしました
-
2017.12.1
12月号をアップしました
-
2017.11.15
11月号後半の記事をアップしました
-
2017.11.1
11月号をアップしました
-
2017.10.16
10月号後半の記事をアップしました
-
2017.10.2
10月号をアップしました
-
2017.9.15
What a healthy time! ~健康を応援する特別なお料理~/第3回 食物繊維たっぷり! 海藻の和風リゾット、FB Monthly Fashion/第9回 秋っぽい柄&色コーデ、子供の無線教室/第9回 「アンテナの形や大きさに注目!!」を掲載しました
-
2017.9.4
<速報>ハムフェア2017を掲載しました
-
2017.9.1
9月号をアップしました
-
2017.8.17
What a healthy time! ~健康を応援する特別なお料理~/第2回 和風のポトフ 納豆ソース添え、FB Monthly Fashion/第8回 夏のお出かけコーデ、子供の無線教室/第8回 「無線機にはどんなものがあるの?」を掲載しました
-
2017.8.1
8月号をアップしました
-
2017.7.18
What a healthy time! ~健康を応援する特別なお料理~/第1回 メロンの冷製スープ ナッツのアイスクリームのせ、FB Monthly Fashion/第7回 コットンTシャツコーデとボーイズコーデ、子供の無線教室/第7回 「電波はどうやって海外や宇宙に届くの?」を掲載しました
-
2017.7.1
7月号をアップしました
-
2017.6.15
What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第9回 FB Girlsの野望 with ムースと甘エビのタルタル、FB Monthly Fashion/第6回 雨の日コーデと親子コーデ、子供の無線教室/第6回 「電波はいろいろなところで大活躍!!」を掲載しました
-
2017.6.1
6月号をアップしました
-
2017.5.15
What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第8回 番外編 春うらら♪豪華弁当でお花見、FB Monthly Fashion/第5回 ブラウス&シャツを使ったコーディネート、子供の無線教室/第5回 「周波数によって変わる、電波の特徴」を掲載しました
-
2017.5.1
5月号をアップしました
-
2017.4.17
What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第7回 ARDFの思い出 with 2種類のソースのカルボナーラ、FB Monthly Fashion/第4回 Gジャンを使ったコーディネート、子供の無線教室/第4回 「電波の性質を覚えよう」を掲載しました
-
2017.4.1
4月号をアップしました
-
2017.3.15
What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第6回 初めてのQSOの思い出 with グリーンのアクアパッツァ、FB Monthly Fashion/第3回 ピンクを使ったコーディネート、子供の無線教室/第3回 「電波はどうやって伝わるの?」を掲載しました
-
2017.3.1
3月号をアップしました
-
2017.2.15
What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第5回 FB Girlsの試験の思い出 withウマ辛和風スープ、FB Monthly Fashion/第2回 デニムと明るめニットのコーディネートを掲載しました
-
2017.2.1
2月号をアップしました
-
2017.1.16
What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第4回 YLハムを増やす秘策とは?! withおなかにやさしいお料理、【新連載】FB Monthly Fashion/第1回 アウター別おすすめコーディネート(ライダース・ノーカラー・ダッフル)を掲載しました
-
2017.1.5
1月号をアップしました
-
2016.12.15
What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第3回 YLハムの行く年来る年 with ブイヤベースの洋風お鍋を掲載しました
-
2016.12.1
12月号をアップしました
-
2016.11.15
FB Girlsが行く!!~元気娘がアマチュア無線を体験~/<第3話>元気娘、秋の休日を楽しむ!!(後編)!、What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第2回 YLハムの悩み解決!with サケのフレンチトーストを掲載しました
-
2016.11.1
11月号をアップしました
-
2016.10.17
FB Girlsが行く!!~元気娘がアマチュア無線を体験~/<第3話>元気娘、秋の休日を楽しむ!!(前編)!、【新連載】What a tasty time! ~グルメYLたちのGirl'sトーク♥~/第1回 FB GirlsのプライベートQSO with 土瓶蒸しのリゾットを掲載しました
外部リンク
アマチュア無線関連機関/団体
各総合通信局/総合通信事務所
アマチュア無線機器メーカー(JAIA会員)
次号は 12月 1日(木) に公開予定
